|
Référence à rappeler : |
|
|
|
|
|
Solenne TAILLÉ |
Julien DIDIER |
|
Avertissement |
|
Si vous arrivez directement sur cette page, sachez que ce travail est un rapport d'étudiants et doit être pris comme tel. Il peut donc comporter des imperfections ou des imprécisions que le lecteur doit admettre et donc supporter. Il a été réalisé pendant la période de formation et constitue avant-tout un travail decompilation bibliographique, d'initiation et d'analyse sur des thématiques associées aux technologies biomédicales. Nous ne faisons aucun usage commercial et la duplication est libre. Si vous avez des raisons de contester ce droit d'usage, merci de nous en faire part . L'objectif de la présentation sur le Web est de permettre l'accès à l'information et d'augmenter ainsi les échanges professionnels. En cas d'usage du document, n'oubliez pas de le citer comme source bibliographique. Bonne lecture... |
|
Université de Technologie de Compiègne |
|
Référence à rappeler : |
|
|
|
|
|
Solenne TAILLÉ |
Julien DIDIER |
|
Résumé Depuis quelques années, on a vu se développer des systèmes de robotique visant à améliorer la précision des gestes chirurgicaux tout en accroissant la sécurité. Ce rapport s'efforce de présenter, les différents robots utilisés en France et en Europe (exception faite des systèmes de neuronavigation) ainsi que les avantages qu'ils apportent aux patients et aux utilisateurs. Les différents aspects de l'implantation d'un robot au sein d'un centre hospitalier ont été étudiés de manière à pouvoir analyser les perspectives d'expansion de tels systèmes et ses conséquences. Mots clé: Robotique, Chirurgie Assistée par Ordinateur, Biomédical. |
|
Abstract For some years, one saw developing systems of robotics aiming to improve the precision of the surgical gestures while increasing safety. This report tries hard to present the various robots used in France and in Europe (exception made by the systems of neuronavigation) as well as the advantages which they bring to the patients and to the users. The various aspects of the implanting of a robot within a hospital complex were studied so as to be able to analyse the perspectives of expnasion of such systems and the consequences.
Keywords: Robotics, Computer Assisted Surgery, Biomedical. |
REMERCIEMENTS
Nous tenons, tout d'abord, à remercier M. Georges Chevallier, directeur du DESS "TBH", d'avoir suivi d'un þil avisé l'avancement de notre projet, et de nous avoir fourni de précieux conseils.
Par ailleurs, pour les renseignements et les précisions qu'ils nous ont apportés sur le robot CASPAR, nous remercions l'ensemble de nos interlocuteurs au Centre Hospitalier Intercommunal d'Eaubonne-Montmorency, à savoir le Docteur Aubart, chef du service de chirurgie orthopédique ainsi que toute son équipe, M. Pierre Dariane, ingénieur biomédical en chef ainsi que le personnel des services économiques.
Au centre Hospitalier Universitaire Saint-Pierre de Bruxelles (Belgique), nous tenons à remercier M. Olivier Germay, "Clinical Technicien" de nous avoir reçu et d'avoir mis à notre disposition sa banque de données sur le robot DA VINCI™.
Chez les industriels fabricants de robots chirurgicaux, nous remercions très vivement M. Thierry Ledoux, spécialiste du produit CASPAR chez Ortomaquet, M. Hervé Toggwiler, responsable français des ventes de ROBODOC® (produit de la société Intergrated Surgical Systems), ainsi que Mme Karin Weibel, responsable du robot DA VINCI™ chez Intuitive Surgical France.
I. Etat de l'art: les différents robots.
I.1. AESOP®: L'endoscope à commande vocale.
I.2. CASPAR et ROBODOC®: Deux robots pour la chirurgie orthopédique.
I.3. DA VINCI™ et ZEUS™: Les robots dédiés à la chirurgie Mini Invasive.
I.3.1. La chirurgie mini-invasive.
I.3.2. DA VINCI™.
I.3.3. ZEUS™.
II. Avantages et inconvénients.
II.1.1 Avantage en chirurgie orthopédique.
II.1.2 Avantages en chirurgie mini-invasive.
II.1.3 Inconvénients (pour le moment).
II.2.1 Avantages en chirurgie orthopédique.
II.2.2 Inconvénient en chirurgie orthopédique (utilisation de CASPAR).
II.2.3 Avantages en chirurgie mini-invasive.
III. Le robot dans le contexte hospitalier.
III.3. Implication de la direction.
III.4. Implication du service biomédical.
III.4.1 Acquisition d'un robot.
III.4.2 Maintenance.
III.4.3. Hygiène et stérilisation.
IV. Le bloc opératoire du futur.
Dès l'entre deux guerres, l'idée de robotisation des chaînes de production commence à voir le jour dans l'industrie. Mais à cette époque, la main d'þuvre était nombreuse, l'électronique de commande n'existait pas, ce qui rendait inutile le remplacement des opérateurs humains par des robots. Un quart de siècle plus tard, l'industrie, notamment automobile, a vu une augmentation de la demande de main d'þuvre plus qualifiée. Par conséquent, des revendications d'amélioration des conditions de travail et une hausse des coûts salariaux s'en suivirent. Afin de réduire ces coûts et d'augmenter la production, les robots ont été introduits. La technique consiste à décomposer le travail en une série de tâches simples et répétitives, ce qui contribue à déplacer la main d'þuvre qualifiée vers des tâches plus intéressantes et à employer des ouvriers moins qualifiés pour assurer le bon fonctionnement de robots
[1].Aujourd'hui, les avantages de la robotisation ne sont plus à démontrer: amélioration de la souplesse des installations, de la qualité des produits, de la productivité. Pourtant, on ne peut pas parler de flexibilité réelle; l'adaptation humaine face à un problème ne dure que quelques instants alors que la reprogrammation d'une machine nécessite une intervention beaucoup plus longue.
Dans le même souci d'amélioration de la qualité des soins fournis aux patients, on a vu apparaître ces dernières années, de nouvelles techniques chirurgicales s'appuyant sur l'utilisation de robots. Ces robots restent cependant opérateur-dépendants: il est impossible de leur confier, pour le moment, une tâche entièrement automatique. C'est pourquoi on parle bien de la robotisation au bloc opératoire et non de l'automatisation de l'acte chirurgical.
Peut-on maintenant imaginer que la robotisation chirurgicale prendra la même tournure que l'automatisation d'une chaîne de production ? Il semble aujourd'hui que non. En effet, les robots utilisés en chirurgie servent à rendre possible des opérations impossibles ou bien à faciliter des opérations complexes plutôt qu'à automatiser des opérations "banales".
Après avoir présenté les différents robots existants, nous nous attacherons à décrire les avantages et inconvénients de telles techniques. Ensuite, nous développerons les perspectives d'évolution ainsi que les limites de la robotisation.
I. Etat de l'art: les différents robots.
Il est difficile d'être exhaustif car il n'existe pas un robot mais une grande variété de systèmes de robotique pour la navigation endosinusale, la neuronavigation ou pour la chirurgie mini-invasive et articulaire. Ce mémoire ne s'attachera qu'à l'étude des systèmes de robotique en orthopédie et en chirurgie mini-invasive (systèmes ayant dépassé le stade de l'expérimentation).
Pour exposer les caractéristiques des différents systèmes présentés ci-après ainsi que leurs modalités de fonctionnement, nous avons été amenés à contacter les équipes utilisatrices de robots en leur faisant parvenir un questionnaire. Sur invitation de certains d'entre eux, nous avons assisté à deux interventions. Ces rencontres nous ont permis d'entrevoir les différents aspects à aborder si, dans notre fonction future d'ingénieur biomédical hospitalier, nous étions amenés à participer à l'acquisition d'un robot chirurgical.
I.1. AESOP®: L'endoscope à commande vocale.
Conçu et commercialisé par la société Computer Motion, AESOP® (Automated Endoscopic System for Optimal Positioning) est le seul robot à commande vocale. Comme son nom l'indique, AESOP® (
fig.1) n'est qu'un système de déplacement et de maintien d'un endoscope utilisé lors d'interventions chirurgicales mini-invasives. Sa grande originalité réside dans sa commande vocale. Le chirurgien enregistre sa voix sur une carte ensuite insérée dans l'AESOP® avant chaque opération. De cette manière, le système n'est capable d'obéir qu'à un seul chirurgien éliminant les risques de mauvaise utilisation. L'AESOP® permet d'organiser différemment l'équipe chirurgicale en libérant un assistant[2]. Ce type d'instruments à commande vocale laisse entrevoir des perspectives : commande de la position de la table opératoire, de l'éclairage du site opératoire ou des lumières d'ambiance de la salle par exemple. En effet, la société Computer Motion travaille déjà sur un système de commande vocale de l'ensemble des éléments d'un bloc opératoire : le système HERMES.

Figure 1: L'endoscope à commande vocale AESOP®
I.2. CASPAR et ROBODOC®: Deux robots pour la chirurgie orthopédique.
La société Ortomaquet implantée à Rastatt (Allemagne) développe le robot CASPAR (Computer Assisted Surgical Planning And Robotics), premier robot européen utilisé pour la chirurgie osseuse et articulaire (
fig.2).Déjà installé à l'hôpital de Montmorency et en cours d'installation à Marseille, Avignon, Nice et Bordeaux, il permet de réaliser des opérations telles que la pose d'une prothèse de hanche et bientôt de genou ou le remplacement des ligaments croisés.

Figure 2: CASPAR, un robot dédié à la chirurgie orthopédique.
D'un point de vue technique, CASPAR est un robot issu de l'industrie électronique doté de 6 articulations, de manière à reproduire aussi fidèlement que possible les mouvements du bras humain. La sécurité opératoire est assurée soit par le chirurgien qui peut stopper le robot à tout moment, soit par le robot lui-même qui, grâce à un capteur de mouvement ultra sensible, peut détecter le moindre mouvement de l'os sur lequel il est en train d'opérer. S'il détecte un mouvement du patient, le robot s'arrête et s'éloigne.
Pour comprendre le fonctionnement de l'ensemble du système CASPAR, prenons l'exemple de la pose d'une prothèse de hanche. Pratiquement, cette opération comporte deux phases: une de planification et une de réalisation. Avant la phase de planification, le chirurgien place deux vis spécifiques aux extrémités du fémur du patient, sous une première anesthésie générale. Il effectue ensuite une image scanner de la hanche malade. Grâce au logiciel de planification PROTON®, ayant intégré les images scanner, il détermine la position optimale de la prothèse. Ce logiciel, fonctionnant sur un micro ordinateur classique, permet, outre de déterminer la position optimale de la prothèse, de juger de la tenue de l'implant.
Il sera bientôt possible d'effectuer une vérification biomécanique de la qualité de la liaison os-prothèse en utilisant un algorithme de modélisation.
Une fois cette première étape réalisée, l'opération peut commencer comme une opération classique. Le chirurgien lance le programme de planification contenant toutes les données relatives au patient et CASPAR débute son travail. Il fraise l'os suivant les données de la planification avec une précision impossible pour la main humaine (quelques dixièmes de millimètre). Le logement de la prothèse étant exactement adapté à l'implant, la surface de contact entre l'os et la prothèse est de très grande qualité, ce qui réduit considérablement les risques de fissure, de cassure ou d'éclatement de la tige osseuse.
L'installation de CASPAR dans un bloc opératoire ne nécessite aucune modification particulière de ce dernier. Outre la nécessité d'installer une alimentation électrique de 380V, il faut s'assurer que le réseau d'air comprimé soit capable d'assurer un débit d'air à la pression de 7 Bars de manière continue pendant une vingtaine de minutes (durée approximative du fraisage d'un fémur pour la pose d'une prothèse de hanche sans complications) pour alimenter le moteur des instruments utilisés par CASPAR.
Concurrent direct de CASPAR, le système ROBODOC® (
fig.3) est également destiné à la chirurgie orthopédique et plus particulièrement à la pose de prothèses de hanche. ROBODOC® est commercialisé par la société Integrated Surgical Systems (ISS).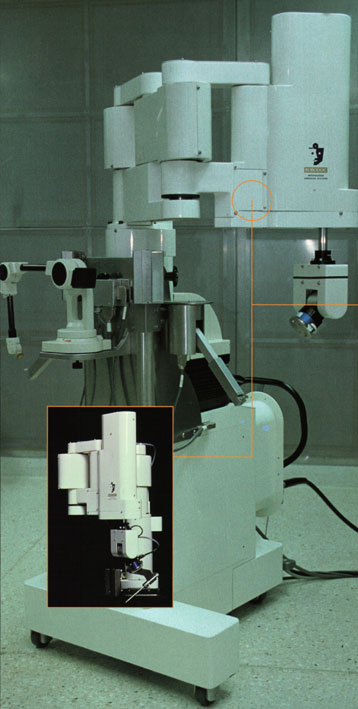
Figure 3: ROBODOC®, un second robot pour la chirurgie articulaire
Déjà installé à Grenoble, Nantes, Rennes, Créteil et Paris, ROBODOC® est un robot chirurgical commandé par ordinateur, équipé d'outils spécialisés pour créer une cavité d'implant exacte dans le fémur d'un patient pour la pose d'une prothèse totale de hanche. Cette technique aboutit à un meilleur positionnement de la prothèse qu'avec des techniques manuelles traditionnelles. Son principe de fonctionnement est identique à celui de son concurrent CASPAR mais présente une différence majeure. En effet, le système de planification ORTODOC® ne nécessite pas d'opération préalable pour poser des vis de repérage dans le fémur. Ce système est capable, à partir de simples données scanner, de reconstruire une image du fémur en 3 dimensions. Disposant d'un fémur virtuel en 3 dimensions, le chirurgien n'a plus aucun mal à positionner le prothèse choisie (qu'elle soit à tige droite ou anatomique). Une fois la planification terminée, les données sont transférées dans ROBODOC® par support magnétique.
La phase de fraisage se déroule de la même manière qu'avec CASPAR, avec les mêmes sécurités. La première étape consiste à effectuer des mesures de dimensions et de positionnement du fémur par rapport au robot. Pour ce faire, la diaphyse fémorale du patient est fixée dans un support stérile relié au robot. Ensuite un digitaliseur vient repérer la position de points remarquables du fémur. Ces mesures sont comparées à celles de la planification. Si les deux mesures correspondent parfaitement (une différence de plus de 1 mm interdit toute intervention sur le patient), l'opération de fraisage peut commencer. Au cours du fraisage, un écran de contrôle permet au chirurgien de suivre le déroulement de l'intervention.
La mise en place de ROBODOC® ne nécessite aucune réorganisation particulière du bloc opératoire.
I.3. DA VINCI™ et ZEUS™: Les robots dédiés à la chirurgie Mini Invasive.
Depuis une vingtaine d'années, la chirurgie mini-invasive (en anglais MIS: Minimaly Invasive Surgery) a connu un essor considérable. Elle contribue à l'amélioration des actes chirurgicaux. En conséquence, la douleur ainsi que les complications postopératoires sont fortement diminuées.
Par conséquent, des techniques nouvelles apparaissent, tendant à améliorer ce type d'opérations, que ce soit au niveau des temps d'intervention, du personnel mobilisé ou du confort apporté au patient et au chirurgien. Ces nouvelles techniques ne sont, pour la plupart, que des améliorations des techniques conventionnelles au niveau des instruments.
La chirurgie assistée par ordinateur, et plus particulièrement l'utilisation de robots chirurgicaux, semble offrir les meilleures perspectives. En effet, des études ont montré l'efficacité de l'utilisation de systèmes de robotique, notamment en chirurgie obstétrique
[3].Pour ce qui est des matériels disponibles, ils restent peu nombreux. En effet, nous n'avons recensé que deux robots: DA VINCI™ de la société Intuitive Surgical et ZEUS™ de la société Computer Motion.
Le système chirurgical DA VINCI™ (
fig. 4) manipule des instruments endoscopiques commandés à distance par un chirurgien au cours d'interventions majoritairement thoracoscopiques et laparoscopiques.Il se compose des éléments suivants: une console de chirurgien avec visionneuse stéréo à affichage tridimensionnel incorporée (le maître), un chariot de chirurgie avec des bras d'instrumentation (l'esclave) et un chariot d'imagerie.

Figure 4: Le système chirurgical DA VINCI®
Assis à sa console, le chirurgien opère à l'aide de deux organes pilotes (ou manipulateurs) placés directement sous un affichage tridimensionnel agrandi du champ opératoire.
Sur l'écran d'affichage, les extrémités des instruments sont alignées avec les manipulateurs pour assurer des mouvements naturels et prévisibles des instruments. Le chirurgien retrouve bien le rapport d'orientation main/þil.
Le système DA VINCI™ place les mouvements des instruments sous le contrôle direct du chirurgien et en temps réel. Il utilise une structure cinématique (ou théorie des mouvements d'articulation) permettant au chirurgien d'employer des techniques de chirurgie ouverte depuis la console. Ces techniques de chirurgie ouverte sont instantanément converties dans le site chirurgical en gestes de chirurgie mini-invasive. À l'aide de ce système, le chirurgien bénéficie d'un accès par des incisions réduites sans avoir à compromettre la dextérité, la précision et les gestes naturels nécessaires en chirurgie ouverte.
Les composants électroniques de DA VINCI™ autorisent les démultiplications des mouvements de la main du chirurgien. Cette démultiplication des mouvements réduit les gestes de la main à des mouvements des instruments proportionnellement plus petits dans le champ opératoire. Différents réglages permettent au chirurgien d'optimiser la démultiplication en fonction d'applications cliniques variées. Les tremblements naturels de la main du chirurgien sont éliminés par un système de filtrage électronique qui assure une maîtrise stable et prévisible des instruments.
Les instruments ont un total de 7 degrés de liberté (fig. 5.2), soit deux de plus à leur extrémité que les instruments endoscopiques traditionnels (fig. 5.1). Les articulations des extrémités imitent la souplesse des mouvements verticaux et latéraux du poignet humain. Ces articulations prolongent les capacités du chirurgien dans une nouvelle dimension car elles lui permettent de pratiquer des opérations chirurgicales reconstructrices complexes au travers d'incisions faisant moins d'1 cm de longueur.
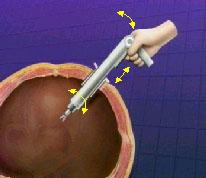
Figure 5.1.: 5 degrés de liberté
Chirurgie traditionnelle
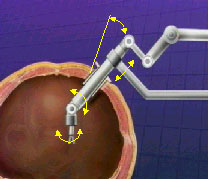
Figure 5.2.: 7 degrés de liberté
Chirurgie robotisée
De part même sa conception, le système DA VINCI™ ne nécessite aucune adaptation particulière de la salle d'opération dans laquelle il est installé. En effet, il se branche sur une simple prise 220 Volts. La seule contrainte concerne la place nécessaire à son installation. L'ensemble (composé des trois parties) est très volumineux et réduit considérablement la place disponible autour de la table d'opération, ainsi que dans la salle elle-même.
Le robot chirurgical ZEUS™ (
fig. 6), de la société Computer Motion, est le concurrent direct du système DA VINCI™. Son mode de fonctionnement est quasiment identique. Seule l'approche du produit diffère. En effet, les bras opératoires ne sont pas montés sur un bloc spécifique mais directement fixés sur la table d'opération au cours de l'intervention. A la différence du système DA VINCI™, les instruments chirurgicaux de ZEUS™ ne sont dotés que de 5 degrés de liberté. En effet, ZEUS™ n'est qu'une transposition robotique des techniques de chirurgie mini-invasive classiques.
Figure 6: Le système chirurgical ZEUS™
Le tableau suivant récapitule la situation de la robotique chirurgicale en France et dans l'Union européenne.
|
Système |
Domaine d'application |
Implantation française (nombre de robots) |
Implantation européenne (nombre de robots) |
|
CASPAR |
Orthopédie |
5 |
environ 50 |
|
ROBODOC ® |
Orthopédie |
5 |
28 |
|
DA VINCI™ |
Chirurgie mini-invasive |
1 |
8 |
|
ZEUS™ |
Chirurgie mini-invasive |
1 |
Non Communiqué |
Il existe cependant de nombreux systèmes de neuronavigation ou de navigation endosinusale (ENTACT de chez PRAXIM,......) qui ne rentrent pas dans le cadre de cette étude mais qui font partie intégrante des Gestes Médico-Chirurgicaux Assistés par Ordinateur.
II. Avantages et inconvénients.
Les atouts majeurs de l'utilisation de robots chirurgicaux sont, la précision du geste, sa sécurité ainsi qu'une réduction significative de la douleur et de la durée d'hospitalisation. Ces avantages se font tout d'abord au bénéfice du chirurgien mais, les conséquences de l'amélioration du geste chirurgical profitent au patient.
Compte tenu de l'aspect novateur des robots chirurgicaux, il semble que certains des avantages escomptés n'aient pas encore été obtenus. En effet, quel que soit le système considéré, les équipes chirurgicales utilisatrices nous confirment qu'une période d'adaptation à ces nouvelles techniques est nécessaire. Cependant, ce phénomène n'est pas propre à la robotique.
Dans les avantages propres à la robotisation citons:
- La diminution de la fatigue.
Le chirurgien se trouve dans une position idéale, assis et reposant ses bras sur la console. Moins soumis à la fatigue, il contrôle ses gestes et par conséquent amoindrit le tremblement des outils. Dans le cas de systèmes autonomes, le chirurgien n'a qu'à contrôler le bon fonctionnement du robot.
- La plus grande précision du geste chirurgical.
Les logiciels des robots comportent des programmes de démultiplication des mouvements ou bien d'automatisation du geste. Ceci rend donc le geste plus précis.
D'autres avantages sont plus spécifiques aux robots utilisés.
II.1.1 Avantage en chirurgie orthopédique.
- Une planification plus rapide de l'intervention.
Avant la pose manuelle d'une prothèse de hanche ou du genou, le chirurgien doit définir l'emplacement approximatif de la prothèse d'après les images radiologiques du patient. La préparation peut être longue et laborieuse si l'on considère que la radiographie n'est pas à la taille réelle de l'os et que le chirurgien doit prendre en compte ce changement d'échelle. Le logiciel de planification est capable de prendre en compte et de corriger les phénomènes de distorsion de l'image. La phase préopératoire ne dure alors que cinq à dix minutes. La position de la prothèse est calculée automatiquement.
II.1.2 Avantages en chirurgie mini-invasive.
-
Une image vidéo 3D nette pendant toute la durée de l'intervention.L'endoscope est habituellement tenu par l'assistant qui, lorsque l'intervention se prolonge, ne peut maintenir une immobilité parfaite. L'image renvoyée n'est plus fixe. L'utilisation d'un bras auquel est fixé l'endoscope élimine ce problème.
- Le choix de certains outils imposé par l'utilisation du robot.
Le chirurgien orthopédique est contraint, pour le moment, d'utiliser les prothèses répertoriées dans la bibliothèque du logiciel de planification. Ces prothèses ne coïncident pas forcément avec celles qu'il avait l'habitude de poser. La bibliothèque des choix ne tardera pas à être élargie. A la fin de l'année les prothèses anatomiques (prothèses s'adaptant à la courbure de l'os) seront introduites dans le logiciel de CASPAR; elles le sont déjà dans le logiciel de ROBODOC®.
- Le type d'opérations limité.
Les différents robots proposés pour la chirurgie orthopédique ne sont programmés que pour la pose de prothèse de hanche. Dans l'année, l'intégration de nouveaux programmes à leur logiciel de planification leur permettra de travailler sur l'os du genou.
- Une mise à jour des logiciels.
Outre les observations précédentes, il y a lieu de s'assurer régulièrement des performances de l'informatique de commande et de suivre les mises à niveau des programmes.
- Un pari fait sur l'avenir et sur le développement de l'entreprise conceptrice.
La mise en þuvre de cette technique évoluée repose sur le dynamisme des deux partenaires, l'équipe médicale utilisatrice et le fournisseur. La disparition éventuelle de l'industriel fragilise l'investissement.
- Une équipe chirurgicale stable.
L'utilisation d'un robot nécessite la formation de toute une équipe chirurgicale. Celle-ci doit être enthousiasmée et motivée par cette nouvelle technologie pour que les buts espérés soient atteints. Aujourd'hui, le personnel formé est limité. La rotation des équipes chirurgicales n'est pas envisageable pour le moment. Le planning des interventions robotisées est donc réalisé en fonction de la disponibilité du personnel et non pas celle du robot.
- Une certaine perte de temps.
Le nombre d'interventions pratiquées avec un robot est encore trop peu important pour que le chirurgien et son équipe aient eu le temps de prendre parfaitement connaissance de ce nouvel outil. Actuellement, une intervention conventionnelle d'une heure et quart est rallongée d'une vingtaine de minutes en utilisant un robot.
II.2.1 Avantages en chirurgie orthopédique.
- Une meilleure surface de contact entre l'os et la prothèse.
Après "l'usinage" manuel d'un fémur, la prothèse est en contact avec 50% de la surface de l'os. En utilisant un système de fraisage automatique, la prothèse et l'os sont en contact à environ 90%.
- La réduction de la douleur.
Lors de la planification de l'intervention, l'emplacement virtuel en trois dimensions de la prothèse est défini de manière à prévenir l'endommagement de la corticale et donc à diminuer la douleur postopératoire du patient.
- La réduction du temps d'hospitalisation et du temps de convalescence.
Moins endolori, le patient peut exercer tout son poids sur sa jambe dès le lendemain de l'intervention. Une rééducation rapide permet d'écourter le temps d'hospitalisation.
- Une réduction du taux de réopération.
Cet avantage pour le patient n'est pas encore vérifié. La plus grande surface de contact entre l'os et la prothèse fait penser que la tenue de la prothèse sera plus longue que celle d'une prothèse conventionnelle. De plus, le fraisage automatique précis évite de fissurer l'os et de le fragiliser.
II.2.2 Inconvénient en chirurgie orthopédique (utilisation de CASPAR).
- Deux anesthésies consécutives.
La veille de l'intervention orthopédique, le chirurgien place, sous anesthésie générale, deux vis dans le fémur malade du patient. Ces vis sont utiles au repérage du robot dans l'espace. Il n'est pas envisageable de procéder autrement pour le moment.
II.2.3 Avantages en chirurgie mini-invasive.
- Un nombre croissant d'interventions en chirurgie mini-invasive.
La chirurgie colorectale, par exemple, n'était possible qu'en incisant l'abdomen. Grâce au robot, un plus grand nombre d'interventions peuvent être réalisées par voie endoscopique.
- La réduction du temps d'hospitalisation.
Pour un temps d'hospitalisation de huit jours après une intervention conventionnelle, le patient ne reste plus que deux jours à l'hôpital après une chirurgie mini-invasive robotisée.
III. Le robot dans le contexte hospitalier.
Le marquage CE est obligatoire pour la mise sur le marché européen de tout dispositif médical. Conformément à la loi, il est apposé sur tous les robots cités et se réfère aux directives européennes suivantes :
-93/42/CEE relative aux dispositifs médicaux.
-93/68/CEE relative à la compatibilité électromagnétique (remplaçant la 89/336/CEE).
Il est intéressant de signaler que, même si tous ces robots ont obtenu le marquage CE, il n'en est pas de même en ce qui concerne l'agrément de la Food and Drug Administration (FDA) aux Etats-Unis. En effet, le marquage CE est moins exigeant en ce qui concerne l'évaluation clinique des dispositifs médicaux.
Il n'existe encore aucune norme française ou internationale verticale (spécifique) concernant les systèmes chirurgicaux robotisés. De plus, la grande complexité et technicité de ces systèmes rend la normalisation délicate. Quand l'utilisation des robots se sera généralisée dans les centres hospitaliers et que les chirurgiens en auront totalement banalisé l'utilisation lors de nombreuses interventions, alors il sera tout a fait indispensable d'élaborer des normes de manière à standardiser les performances de tels systèmes.
III.3. Implication de la direction.
Compte tenu des forts coûts occasionnés par l'achat ou la location d'un système de robotique chirurgicale (de 3,5 à 6,5 Millions de francs selon le système considéré), une forte motivation de la direction de l'établissement hospitalier est nécessaire.
On peut penser que l'installation d'un système de robotique au sein d'un établissement de santé (public ou privé) puisse avoir un impact certain sur la notoriété de ce dernier. En effet, en connaissant les avantages apportés par de tels systèmes, les médecins prescripteurs d'interventions chirurgicales seront plus enclins à diriger leurs patients vers l'établissement équipé.
Dans l'immédiat, certains systèmes sont disponibles à la location plutôt qu'à l'achat. Si la société venait à ne plus effectuer de mise à jour des logiciels, si la technique devenait obsolète, la location apparaîtrait comme le choix le plus judicieux si le contrat est bien rédigé et le surcoût acceptable.
De plus, le prix d'une opération réalisée avec un robot étant plus élevé (temps d'opération plus long, mobilisation d'une salle...) et la Sécurité Sociale ne faisant, pour le moment, aucune distinction entre les deux types d'interventions, il s'agit donc, dans la plupart des établissements, de prendre en charge le surcoût lié à l'utilisation du robot. En ce sens, il est indispensable que la direction de l'hôpital soit convaincue des avantages que l'utilisation d'un robot apporte pour pouvoir débloquer les fonds nécessaires. Le retentissement de l'utilisation de robots en terme de points ISA (Indice Synthétique d'Activité) est nul car le GHM (Groupe Homogène de Malades - base de calcul des points ISA) ne tient pas toujours compte des moyens mis en þuvre pour réaliser une intervention.
En compensation de ce surcoût, des avantages financiers non négligeables sont à mettre au profit de ce type d'interventions. En effet, si l'intervention même reste plus onéreuse, la durée d'hospitalisation, quant à elle, se trouve nettement diminuée.
De même, la durée de la convalescence étant raccourcie, le patient peut reprendre son activité professionnelle plus rapidement. Il s'agira donc pour la Sécurité Sociale de prendre en charge ce type d'intervention en diminuant les temps d'arrêt maladie.
III.4. Implication du service biomédical.
III.4.1 Acquisition d'un robot.
Comme tout dispositif médical, les robots sont soumis en France au code des marchés publics pour l'achat. L'ingénieur biomédical, en relation avec le chirurgien instigateur du projet, est chargé d'établir un protocole de comparaison des performances des différents robots en vue de la rédaction du Cahier des Clauses Techniques Particulières (CCTP).
Pour argumenter son choix, il est dans l'intérêt de l'ingénieur biomédical de s'informer auprès des services chirurgicaux du mode d'utilisation du robot que l'établissement projette d'acquérir et de prendre en compte tous les coûts de fonctionnement (outils, désinfection, temps d'indisponibilité...).
La plupart des établissements de santé ayant investi dans un robot ont inclus, dans leur contrat, la maintenance du robot par le fournisseur. En effet, le degré de technicité étant très élevé, il est difficile, pour le service biomédical, de prendre en charge les opérations de maintenance sur ce type de produit. Cependant, il surveille que les interventions de maintenance sont effectuées à temps et dans les conditions du contrat.
Il est imaginable de former des techniciens biomédicaux à la maintenance des robots mais le coût d'une formation et la restriction du champ d'application rendent cette formation inutile.
Les robots sont emballés dans une housse en plastique stérile à usage unique avant chaque intervention (
fig. 7). Les instruments propres à chaque robot sont fixés aux bras de ces derniers après une simple stérilisation à l'autoclave. Les interfacages des instruments avec les robots se font au travers de la housse de manière à ce que l'ensemble soit parfaitement stérile.
Figure 7: Emballage d'un robot avant son utilisation.
IV. Le bloc opératoire du futur.
Figure 8: Le bloc opératoire du futur
Dans l'état actuel de la technique, on peut prévoir l'étape suivante: les instruments fixés sur le robot seront munis de capteurs permettant le retour des sensations tactiles du chirurgien. Sur l'écran le chirurgien visualisera non seulement l'image optique transmise par la caméra mais également des images reconstruites à partir des techniques modernes d'imagerie (Scanner, IRM,...).
L'acte chirurgical pourra également être simulé et visualisé sur l'écran avant d'être réalisé. Lorsque l'acte "idéal" sera intégré, le robot contrôlera le geste réel en limitant l'amplitude, de manière à ne pas léser une structure critique identifiée lors de la simulation.
Il sera également capable de corriger les tremblements en miniaturisant le mouvement de la main du chirurgien, tout cela pour aboutir à un acte chirurgical le plus harmonieux possible.
Comme nous venons de le voir, la chirurgie assistée par ordinateur prend deux directions différentes, à savoir la robotisation passive où le robot ne fait que seconder le chirurgien, et la robotisation active dans laquelle le robot autonome accomplit de façon indépendante certaines sous-tâches
[4]. Malgré tout, certaines contraintes limitent les perspectives de développement de la robotisation car l'erreur n'est pas permise et la fiabilité doit être totale.Comme le dit le professeur Marescaux, "les progrès sont si rapides dans le domaine de la robotisation que les robots sont rapidement obsolètes". C'est pourquoi, certains systèmes, sont déjà équipés de commandes prévues pour intégrer de nouvelles fonctionnalités (comme la suture automatique ou la commande vocale de tous les éléments du bloc), anticipant ainsi sur l'éventuel passage de la robotisation à l'automatisation.
Grâce à l'utilisation d'un système démultiplicateur de mouvements, le chirurgien, non soumis aux contraintes de stérilisation, se trouve éloigné du champ opératoire assis à l'écart devant une console de commande. Les nouvelles technologies concernant le transfert d'informations à haut débit permettent d'opérer à plusieurs centaines de kilomètres. D'ailleurs, la première intervention à distance devrait être effectuer prochainement entre Strasbourg et New York. Cependant, la mise en place de tels systèmes de téléchirurgie nécessitent la présence d'une équipe chirurgicale compétente auprès du patient de manière à pouvoir reprendre le déroulement de l'opération en cas de dysfonctionnement du système.
De même, la téléchirurgie pourrait permettre à un chirurgien de confier une tâche trop ardue à un confrère plus familiarisé avec le geste à effectuer. En effet, comme on le voit dans les sociétés de conseil en informatique, on peut imaginer, grâce à la téléchirurgie, le développement de systèmes de "hot lines chirurgicales" selon le principe suivant (
fig. 9):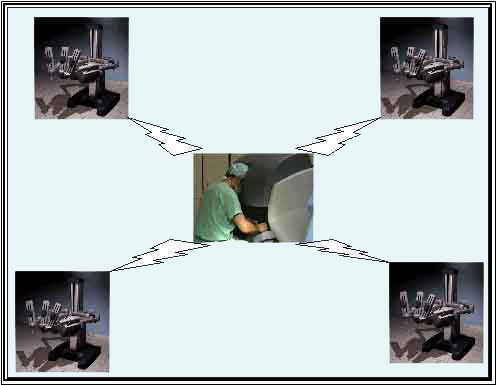
Figure 9: Schéma de principe d'une "hot line chirurgicale".
Un service chirurgical spécialisé possède une console permettant de commander des robots installés dans d'autres établissements de santé. Quand un chirurgien rencontre une difficulté, il peut s'adresser à un chirurgien spécialiste "de garde" qui l'aide à poursuivre son intervention à distance ou prend la direction de l'opération.
Quant à la robotisation active, elle semble prendre une toute autre tournure. En effet, s'il est possible d'automatiser totalement une action comme le fraisage du fémur lors de la pose d'une prothèse de hanche, il parait tout à fait concevable d'automatiser tout le processus opératoire. Les techniques d'imagerie actuelles permettent de connaître avec précision l'anatomie du patient. En intégrant ces données anatomiques à un logiciel de planification et en lui précisant l'action à accomplir, le robot pourrait opérer seul. Le chirurgien n'aurait alors qu'une mission de surveillance du bon déroulement de l'intervention. Prenons comme exemple, celui d'une prothèse de hanche.
Le schéma suivant (fig. 10) explique comment évoluerait ce type d'intervention depuis la chirurgie classique jusqu'à l'automatisation quasi totale du geste dans le cas d'une arthroplastie totale de la hanche.
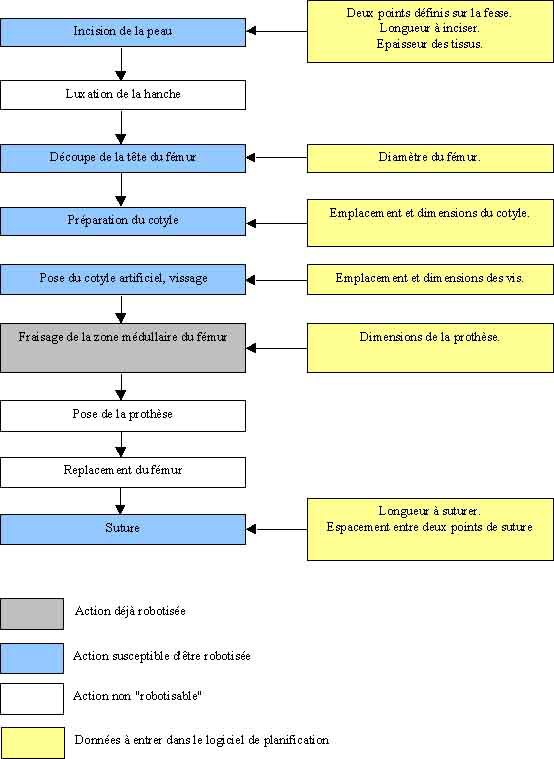
Figure 10: Exemple d'une arthroplastie de la hanche automatisée
Même s'il est tentant de comparer le couple "planification-intervention" en chirurgie avec le couple "programmation-fabrication" en industrie, il convient tout de même de considérer le fait que le patient n'est pas un produit de consommation sur lequel on peut accepter un certain nombre de défauts. L'éthique médicale rend les chirurgiens responsables de leurs patients. Il n'est pas question pour eux de s'en remettre aux robots en tant que suppléants mais plutôt d'utiliser habilement ce nouvel outil[4].
IV.2. Limites de la robotisation.
Comme nous venons de le préciser, le "produit" manipulé par le robot est plus complexe qu'une carrosserie de voiture. En ce sens, le premier frein au développement de la robotique chirurgicale est d'ordre moral car les patients ne sont pas forcément prêts à confier leur santé à une machine plutôt qu'à un chirurgien. Cette réticence n'est sans doute que temporaire car, pour les jeunes générations nées avec la robotique, le concept est beaucoup plus facile à accepter.
La formation des chirurgiens face à l'utilisation de ces nouvelles technologies doit se faire avec prudence. En effet, il est difficilement concevable que les chirurgiens ne reçoivent qu'un enseignement axé sur la manipulation de robots. Le fonctionnement de ces derniers dépendant de nombreux paramètres extérieurs (électricité, air comprimé...) il est indispensable que le chirurgien puisse reprendre la main en cas de dysfonctionnement, et donc, par exemple, qu'il sache percevoir les sensations tactiles procurées par les différents tissus humains. C'est pour cela que la formation à l'utilisation d'un robot ne doit venir qu'en complément d'une formation classique.
Une autre limite à l'investissement dans un système de robotique vient du fait qu'il n'est, pour le moment, destiné qu'aux interventions assez complexes et donc non accessible à de petits centres hospitaliers. En effet, l'utilisation d'un robot pour une opération banale comme une appendicectomie ne présente aucun intérêt, non seulement pour le patient, mais aussi pour l'équipe chirurgicale qui met en marche un système complexe pour un geste minime. Autant l'hôpital peut se permettre de dépenser des sommes importantes pour une plastie de valves cardiaques (dépense compensée par un très bon rapport coût/bénéfices patient), autant il ne peut se le permettre pour une amygdalectomie.
D'autre part, l'Assurance Maladie ne fait aucune différence en matière de remboursement des interventions chirurgicales robotisées. Par contre, lorsque des études cliniques et économiques auront démontré la nécessité, ou, au contraire l'inutilité, de tels systèmes, cette position sera certainement amenée à évoluer.
Un projet réalisé en 1995
[5] s'attachait à présenter l'expérimentation de nombreux logiciels de commande de robots chirurgicaux (comme MINERVA développé par l'École Polytechnique Fédérale de Lausanne) et mettait en évidence la naissance de systèmes de robotique. Il évoquait déjà la possibilité de communication à distance entre les chirurgiens grâce à l'évolution des réseaux de télécommunication. Même si les systèmes de robotique n'utilisent toujours pas la télétransmission, il convient de souligner que les réticences à cette mise en réseau ne sont plus une question de technologie.Aujourd'hui, les robots ne sont plus à l'état d'expérimentation mais sont utilisés dans différents services de chirurgie européens.
En effet, la robotique chirurgicale est sur le point d'intégrer certains blocs opératoires. Son efficacité, en termes de bénéfices apportés aux patients, n'est plus à démontrer. Seules les conséquences économiques ne sont pas encore évaluables avec précision. Il est alors assez difficile de prédire l'ampleur que prendra ce type de chirurgie n'ayant pas connaissance de tous les paramètres dont il dépend (restrictions budgétaires à venir, réforme de l'hospitalisation, décision des malades...).
Il conviendra, en outre, de ne pas considérer le robot comme un remplaçant du chirurgien mais comme l'un de ses outils lui permettant de réaliser des gestes plus précis avec plus de sécurité. En effet, les systèmes de robotique ont été développés dans le seul but d'améliorer les soins délivrés aux patients.
Outre les solutions existantes, il est tout à fait envisageable de voir apparaître de nouveaux systèmes visant à faciliter les gestes chirurgicaux complexes. Par contre, l'automatisation complète d'une intervention est une piste qui ne fera certainement pas l'objet de nouveaux développements car elle n'apporte pas d'avantages supplémentaires au patient.
[1]. ENGELBERGER, J.F.
Les robots industriels: applications, gestion et pratique.Edition Hermes Publishing, 1981, p.10-19
[2]. JOHANET, H. Robot à commande vocale: une nouvelle aide opératoire?
Annales de chirurgie, 1998, vol.52, n¡9, p.918-921
[3]. METTLER, L.,IBRAHIM, M. and JONAT, W. One year of experience working with the aid of a robotic assistant (the voice-controlled optic holder AESOP®) in gynaecological endoscopic surgery.
Human Reproduction, 1998, vol.13, n¡10, p.2748-2750
[4]. RABISCHONG, P. Robots for Surgeons or Surgeons for Robots?
Computer Aided Surgery, 1997, vol.2, p.3-4
[5]. GINESTA, J.M., JOCKUM, F. et VALMORIN, J. La robotisation dans l'acte chirurgical: état des lieux et perspectives.
Projet DESS TBH, UTC, 1995
[6]. GERMAY, O et CADIERE, G.B. Robotique et téléchirurgie.
Exposé, HOPITECH 99, Saint Malo, 6 octobre 1999
[7]. LAVALLÉE, S. Gestes Médico-Chirurgicaux Assistés par Ordinateur.
Exposé, SFGBM 99, Paris, 22 Novembre 1999
Site Internet de la société Computer Motion: www.computermotion.com
Site Internet de la société Intuitive Surgical:
www.intuitivesurgical.comSite Internet de la société Ortomaquet:
www.ortomaquet.deSite Internet de la société Integrated Surgical Systems:
www.robodoc.comSite Internet du Programme Médicalisé du Système d'Information:
www.le-pmsi.fr

